top of page
Prosthetic Arm
Converts arm rotation to gripping motion
WHAT
-
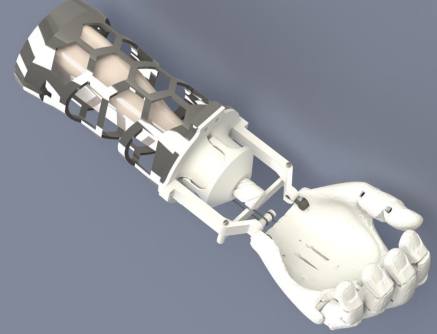
Designed and prototyped a prosthetic arm to convert arm rotation into a grasping motion
-
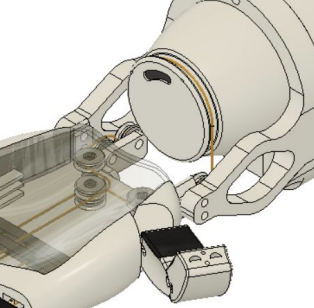
Developed 2 mechanisms to achieve this conversion : leadscrew and pulley
HOW
-
Designed assembly parametrically in Fusion360, to allow for different configurations of arm sizes for each user
-
Implemented springs to achieve underactuated grasp (actuated DoF < DoF of motion)
-
Surveyed arm sizes among age groups 18-50 to determine ideal link-lengths for prosthetic arm
RESULTS
-
1 degree of freedom drove 5 digit grasping motion, with grip strength sufficient to hold 1kg
-
Patent process for this implementation is ongoing
bottom of page