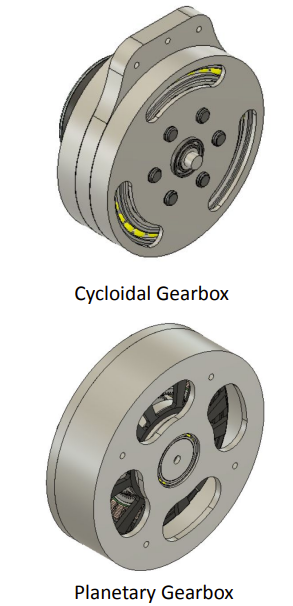
Planetary Gearbox
Back-drivable gearbox for proprioceptive applications
WHAT
-
Designed and prototyped a single-stage planetary gearbox as part of developing a proprioceptive actuator for a quadruped robot
-
Selected machine elements (bearings, bushings, pins, gears) and fasteners based on static force calculations
HOW
-
Designed assembly parametrically in SOLIDWORKS, to allow for different configurations of gear ratios
-
Calculated required output torque by solving dynamical equations of motion of quadrupedal robot
-
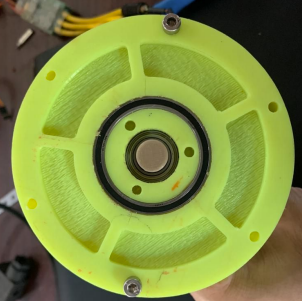
Prototyped gearbox using rapid prototyping (FDM 3D Printing)
RESULTS
-
Gearbox had a maximum output torque of 14 N-m with a 6:1 reduction
THE CHALLENGE
Iterating through various available actuators to ensure maximum output torque while keeping the gear ratio under 10 was a challenging task. A ratio < 10 was required to ensure proprioception, i.e., the robot leg would be backdrivable and hence “feel’ the ground.